

The ocean is a place of constant dynamic movement. Fish use their fins to push water away from themselves, and because every action has an equal and opposite reaction, they therefore move forward. Some cephalopods use jet propulsion, constricting their mantle cavity to push water out through siphons, allowing them to jet forward like a deflating balloon. And other life forms sail the seas on constantly moving currents , indirectly harnessing the power of the sun and earth.
Bivalves are a fairly sedentary bunch by comparison. While most bivalves have a planktonic larval form, when they settle they are constrained to a fairly small area within which they can burrow or scramble around with their muscular feet.

But some bivalves have evolved to move at a quicker rate. The most famous swimming bivalves are the scallops, which have evolved to use jet propulsion, similar to their very distantly related cephalopod relatives. But unlike the cephalopods, scallops evolved to use their hinged shells to aid this process!
Many filter-feeding bivalves use their shell valves as a biological bellows to pull in water for the purposes of sucking in food, or even to aid in digging, but scallops have developed another use for this activity, to enable propulsion. Scallops draw in water by opening their valves to create a vacuum which draws in water to their sealed mantle cavity. They then rapidly close their valves using their strong adductor muscles to pull them together, which pushes the water back through vents in the rear hinge area, propelling the scallop forward.
Using this strategy, scallops can evade predators and distribute themselves to new feeding sites. It’s a surprisingly effective swimming technique, with the queen scallop able to move 37 cm/second, or over five body lengths per second! Michael Phelps would have to swim at nearly 35 km/h to match that relative speed (his actual highest speed is around 1/3 of that). I’m sure sustaining that speed would be tiring for Mr. Phelps, though, and it’s the same for scallops, only using their swimming for short-distance swims.
(video from Supplemental Materials of Robertson et al. 2019)
A recent paper from a team in Switzerland just came out describing an effort to engineer a robot which imitates the scallop’s elegant and simple swimming method. The resulting totally adorable “RoboScallop” closely imitates the design of a scallop, using a pair of hinged valves with rear openings to allow the movement of water backward. The internal cavity is sealed by a rubber membrane draped across the front so that all water is forced through these rear vents when the Roboscallop snaps shut.
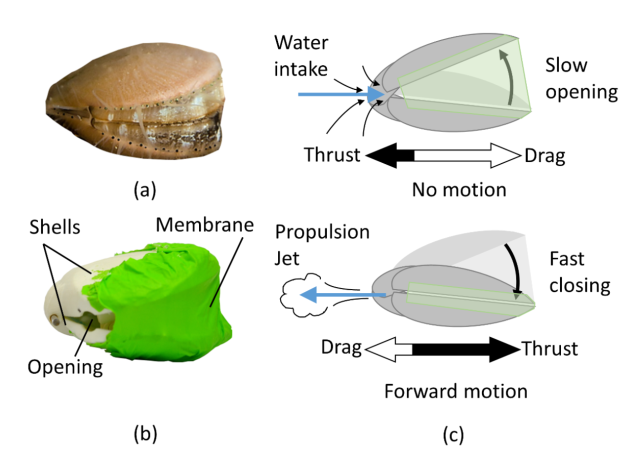
As seen in the diagram above, the rhythm and relative velocity of opening vs closing is important to make sure the RoboScallop actually moves forward. If the scallop opened as quickly as it closed, it would just rock back in forth. It instead opens slowly so that it does not draw itself backward at the same rate that it can push itself forward. The researchers had to do quite a bit of calibration to get these rates right (equating to about 1.4 “claps” per second), but once they did, they ended up with a RoboScallop that can generate about the same force of forward movement (1 Newton) as a real scallop (1.15 Newtons), and similar rates of speed.
This paper really fascinated me because it is merely the latest in a long line of successful engineering projects imitating the ingenuity of evolution. Other marine robots have been made which emulate the locomotion of fish, manta rays, sea snakes and other forms of swimming. And now we have a clam! Let me know when I can buy one to play with in my pool.
